Vehicle motion tracking across multiple video frames
About:
Implemented a object tracking computer vision
algorithm which tracks an object across multiple
camera frames. The results shot from a drone,
analyzed by the algorithm are shown below.
Existing problem:
Motion tracking faces problems while objects across
several camera frames undergo changes such as
occlusion, scaling, rotation. Algorithms also take
large amounts of time for computations.
Improvements achieved:
Used multithreading for fast computations on video feed.
Achieved tracking across multiple video frames with
invariance to changes in the vehicular objects, such
as scale, pose and rotation, as well as occlusion by
other objects, using Lucas Kanade tracking and affine
transformations. Achieved a speed gain of 1.5x using
an inverse composition algorithm.
Affiliation: Advanced Computer Vision, 16720-B,
Robotics Institute at Carnegie Mellon University
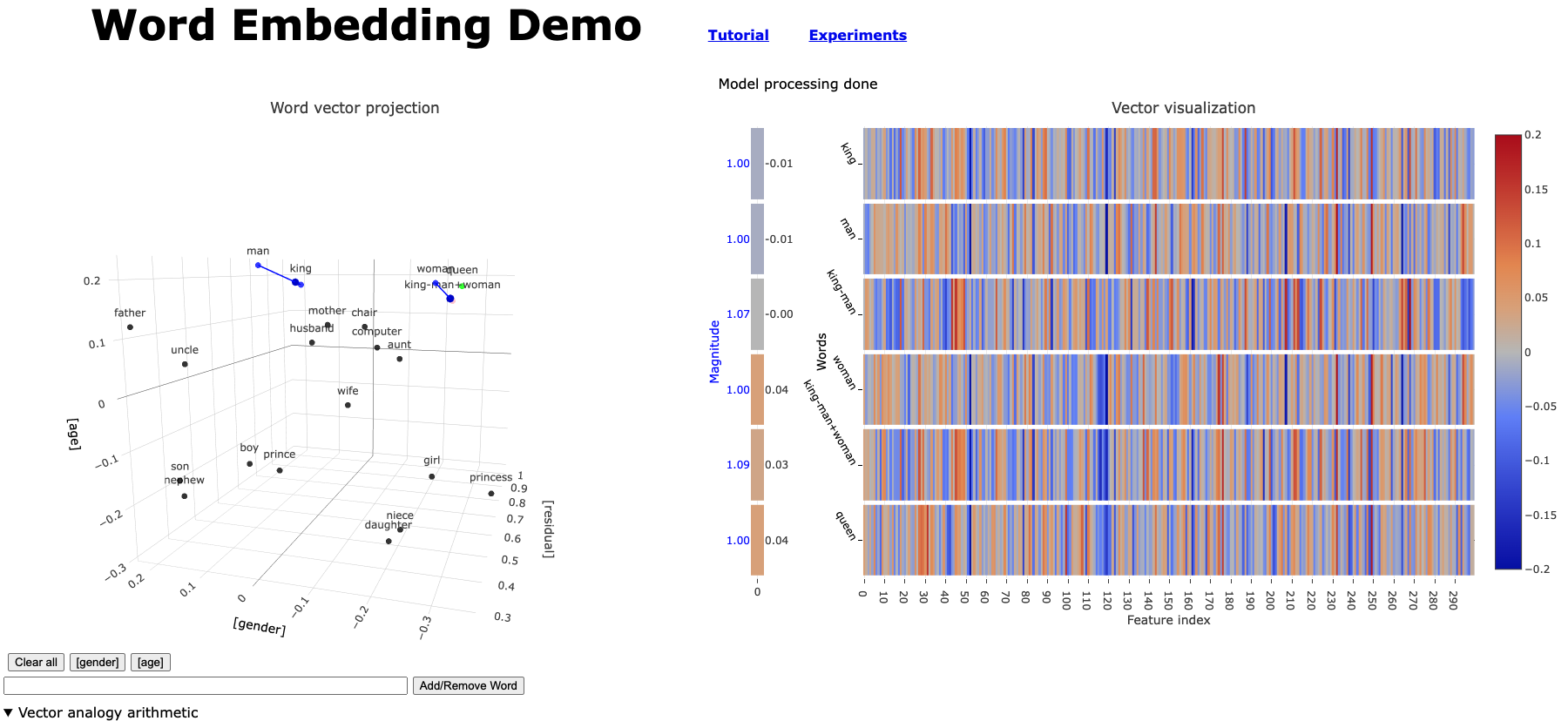
Interactive Embeddings from BERT and FastText
About: Published and presented at the EAAI symposium, part of the AAAI - 2022 Conference on Artificial Intelligence. Currently developing a visualization tool for the national AI curriculum and middle school AI education. This research is funded by the NSF - ITEST program
Existing problem: Neural networks, specifically used for NLP, are abstruse black boxes that seldom give intuition, and often unknown to the end-user.
Improvements achieved: An interactive visualization of semantic dimensions and BERT / FastText embeddings that allows users to intuitively explore analogies in language and embedded states of the neural network.
Affiliation: AI4GA, National Science Foundation, AI4K12, School of Computer Science at Carnegie Mellon University
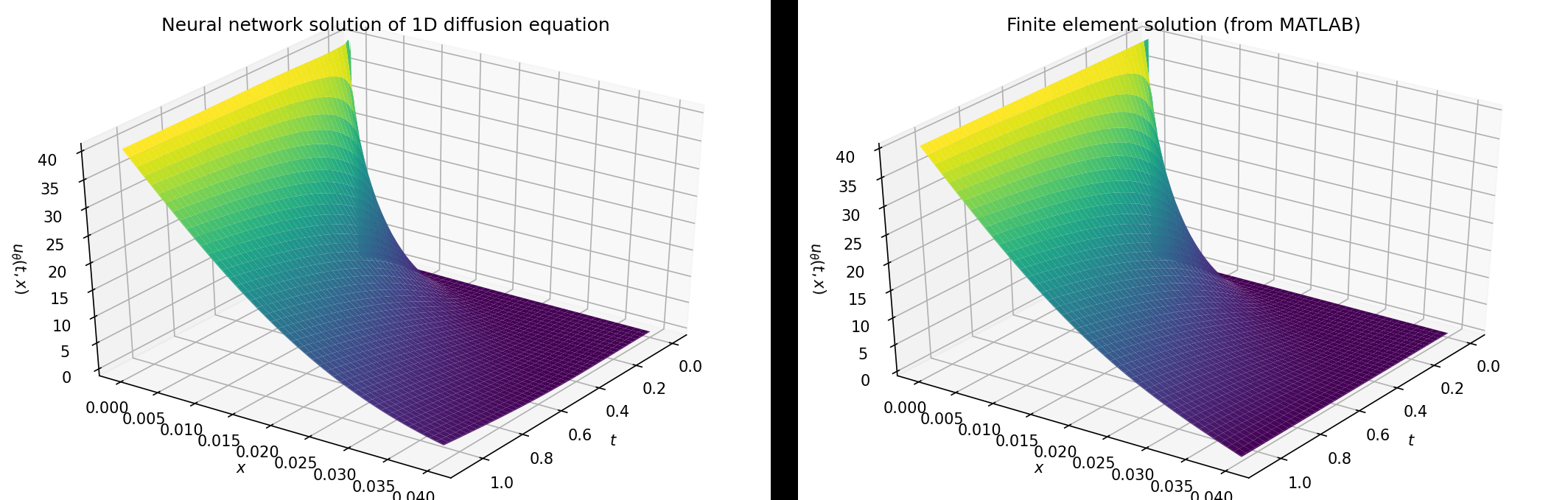
Physics Informed Neural Networks
About: Developed a neural network architecture using TensorFlow and Keras for a PINN solver that solves differential equations using backpropagation and specially modified loss functions for CFD solutions.
Existing problem: Traditional solvers are computationally very expensive and use huge amounts of installation and solver spaces, and runtimes.
Improvements achieved: The neural network solves the equation at much lower orders of time steps. Model is highly accurate for lower values and robust to time scaling.
Affiliation: Summer Research Fellowship, College of Engineering, Carnegie Mellon University
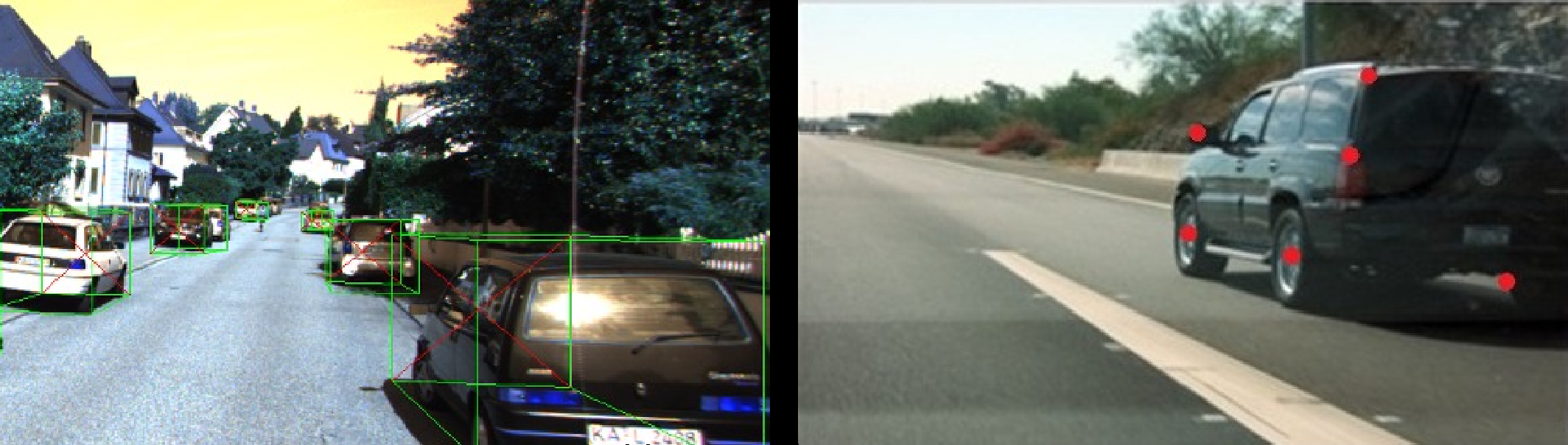
3D pose detection for UAV navigation
About: Used Yolo CNNs and 3d geometrical
algorithms to predict pose of tunnel vehicles to understand direction
of motion required for navigation. My research focused on generating a
method that generated two outputs:
1. Perspective-n-Pose detection algorithm, and
2. 3D bounding box detection using geometry
to predict the pose from a single image, based on
this
research paper.
Existing problem:
3d pose detection was a challenge faced by Toprise Inc. to navigate
a UAV through a tunnel for entities like vehicles and workers. This
project tackles pose detection of vehicles using 3D-object computer
vision.
Improvements achieved:
Achieved a testing accuracy of 95% on the KITTI dataset, extracting
3d data from images for training the model. The model used these 2d
images to generate 3d bounding boxes solely based on geometry.
Affiliation: Toprise Inc., Computational Engineering And Robotics
Laboratory, Carnegie Mellon University
Python based cruise control of battery electric vehicle
About: Simulated and deployed an electric vehicle cruise control system.
Existing problem: Present vehicle controller could only perform manual functions. Owing to more control on the electric powertrain, there was a large scope for providing high-end functions like cruise control to the customer, at a lower cost of overall vehicle.
Improvements achieved: Successfully deployed 2 degrees of control in the simulator, and 1 degree of control in on-road electric vehicle. Tested the vehicle for 600 km for robustness.
Affiliation: PMV Electric Private Limited
Reliable distributed system for fault masking under fault injection.
About:
Working on an HTTP service that can edit config on a website UI, using Java network programming.
The final project goal is to build a fault tolerant distributed system including components such as a
client-server architecture, local fault detector, global fault detector, replication manager.
(More details will be updated as we achieve the project mmilestones.)
18-749 : Building Reliable Distributed Systems, Carnegie Mellon University
Covid-19 self test kiosk
About: Created a rapid contactless dispensing system for test kits using
a raspberry pi SBC and pi camera to scan QR codes and map them to unique user IDs.
Existing problem: Existing COVID-19 testing measures involve a large amount of exposure to the frontline workers,
students, faculty and staff. Overall process of testing is about 20 min.
Improvements achieved: Dispenses test without any contact in < 20 sec. Program triggers auto sanitization of machine.
Affiliation: 24-671 : Electromechanical Systems Design, Carnegie Mellon University